With there being a 4 day weekend here, I hope to make a bit more progress on the build. Over the last week or two I’ve completed the wiring harness for the center mechanism on the test jig

And so now I have a completely wired:
- 8 Ball Trough w/ Jam Switch (if a ball fails to exit, can detect if there’s now 2 vertically stacked on each other
- Opto Detectors on the Left and Right subway entrance so I can detect which side the ball enters from
- Ejector Solenoid
- Stepper motor
- Homing switch for stepper – in work, I have the cabling, I forgot how I had it hooked up to the trinamics steprocker board; will capture a schematic next time or maybe go reference some of the older pictures .. i knew there was a reason I did this blog.
Which leads me back to the less fun part… Software.. 😉
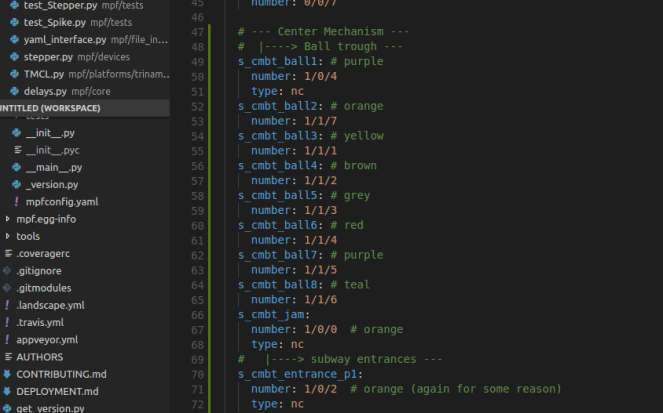
The Mission Pinball framework is very config file (YAML) heavy. So the firs step is getting your config files all setup for which IO pins are which functions, and I’ve also used this to capture my color coding. I am ashamed that with 11 colors of wire, I’ve discovered that I reused the same color in connectors with as little as 8 pins.. obviously, doing a lot of this early before I’ve had coffee isn’t paying off.
I’m using Visual Studio Code for editing.. on Linux.. yep, Microsoft has released a stripped down Visual Studio for Linux now, that’s free. Has lots of language highlighting, plugins for python, intellisense, and even understands python unit test frameworks.
I’ve got everything detected now and am going to work this weekend to bring it together with the stepper. Ideally, this goes smoothly and something resembling a mode involving the contraption exists by the end of the weekend.
After that it’ll be drilling the holes into the real game and moving from the test fixture. So, maybe by the end of the holidays can maybe play something? We’ll see, trying not to get overly ambitious.
